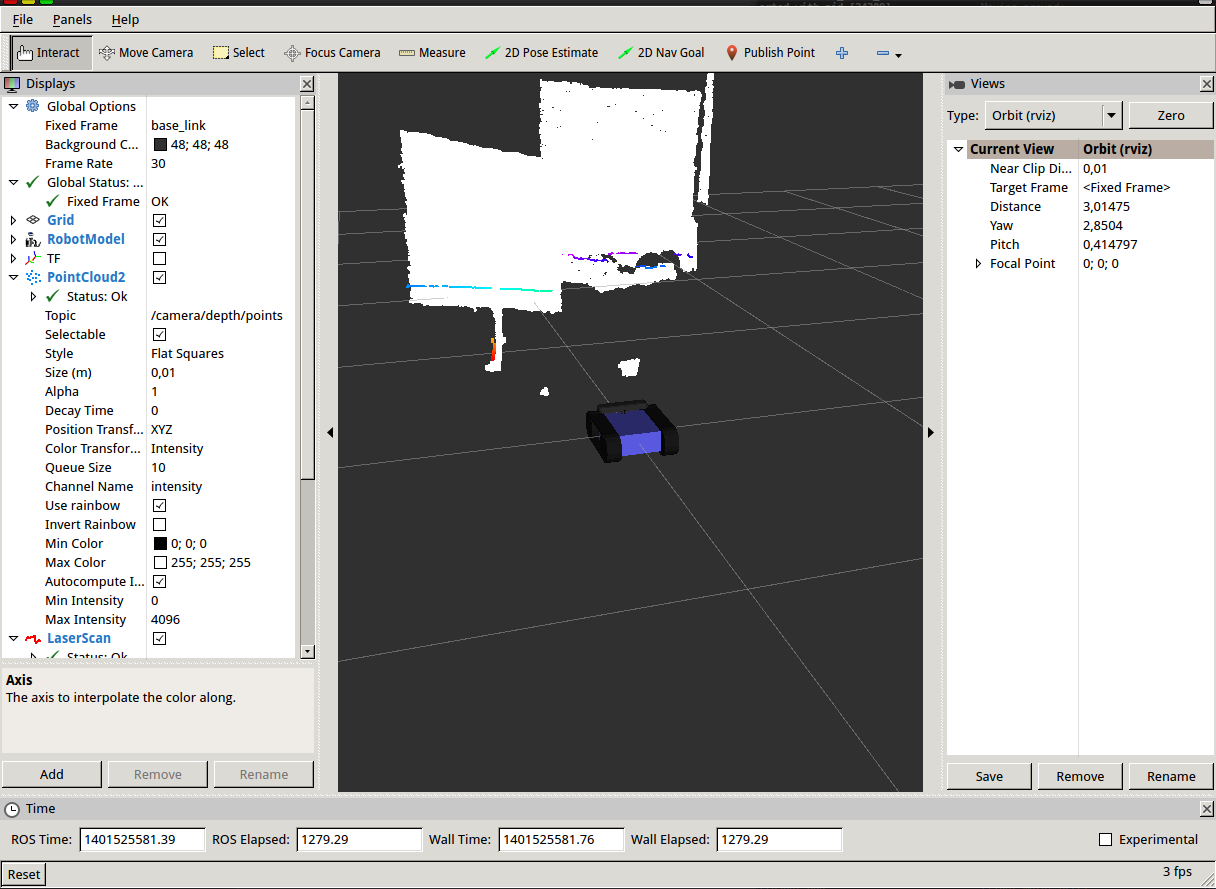
Screenshot_AmoseroURDF5 ← Previous Next → the laserscan shows data according to the camera position relative to the robots base link