 I reactivated my old laptop and released the source code of the amosero robot. In case you want to build your own – do not hesitate to contact me to get a detailed construction info for free.
I reactivated my old laptop and released the source code of the amosero robot. In case you want to build your own – do not hesitate to contact me to get a detailed construction info for free.
Have a nice day!

I reactivated my old laptop and released the source code of the amosero robot. In case you want to build your own – do not hesitate to contact me to get a detailed construction info for free.
Have a nice day!




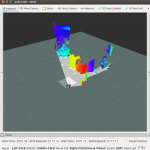
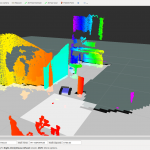
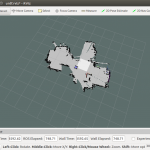
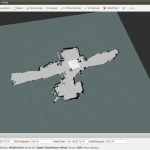
I have implemented a 3D photo function that is computational not very intensive. It gets triggered by pressing a key when a snapshot is wanted. By that it is possible to add a big Point Cloud around the map as you can see here:
Now writing needs to be finished, code needs to be commented and cleaned up – last two weeks already begun.
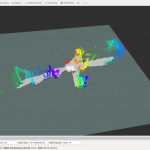
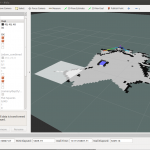
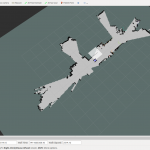
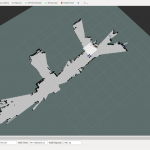
Today is the day of the first accurate aMoSeRo map. I tried several slamming algorithms e.g. the hector_mapping package, but data has been to bad. So after reviewing nearly all my code, fixing a lot of unit issues and publishing rates, today the first map has been created, which really is a map of the place I am living!

It sure is. But a good odometry in a robotic context is an objective that is hard to achieve. For a robot like the aMoSeRo only two main velocities are relevant: linear and angular speed. Both do not occur on the same time, but still – correctly determining any of them is essential as most higher algorithms like slamming and planning highly depend on it. For me in a out of time running thesis, this task can be the biggest still kinda opened challenge.
All other system parts like gmapping, robot_pose_ekf, tf_broadcasts, sensor code, drivers, dynamic_reconfigure (insert long list of other important things here) are up and well enough running. Most of the thesis is written, only evaluation (experiments) and conclusion (the big round up in the end) is still missing.
Therefore I am really looking forward to a time after my thesis – full of well deserved sleep and a university degree 🙂

It has been really quiet in this blog recently. This is because I am currently writing my thesis in latex. Therefore I thought today is a good moment to tell you about some things i learned since the last post.
I have been putting lots of effort into the history of mobile robotics, have been researching some sources and achieved some knowledge about the recent development of Willow Garage, Boston Dynamics and some universities like the TU-Darmstadt.
hence I now distinguish between mobile robots, UGVs and AGVs, consider Willow Garage as possibly dead (even if it isn’t since the majority of employees moved in February) and feel deep respect of whats possible with legged robots shown by Boston Dynamics.
Time is running, it’s scary and spectacular at the same time regarding what is possible with mobile robots. My first 10k of words have been written and there is sill a lot more to be done until the 29th of September 2014.
It is only consequent to leave the virtual cookie box too:
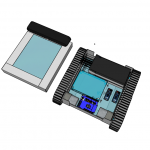
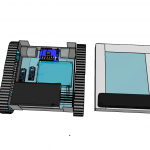
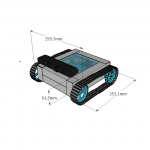
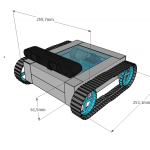

Finding a low cost case isn’t as easy as expected – even with some common dimensions around 200mm*200mm*50mm the only inexpensive thing I found, was an star wars cookie box made out of thin plate.
So to change that I went to a DIY-Store today (or Baumarkt in german) and bought a 2 meters aluminium mopboard, some metal glue, acrylic glass and went to the basement:






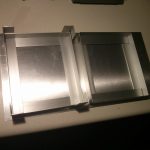


But after cleaning the gluey mess off the table with spiritus, taking a well deserved shower and waiting 24 hours for the glue to get its full power the result is something able to be shown:






It’s a bit bigger than before but provides the basic functions in only 40 mm height. So we’ve got a real mobile plattform (base_footprint) for all upcoming modules (i.g. mesh networks, robot arms, flying drones or sensors like Geiger-Müller counters).
We’ve reached half time! Lets see whats still possible 🙂
For multiple reasons the TU Bergakademie Freiberg took part in the Dresdner Berufsorientierungstage at the day of mathematics on the 15th of July 2014.
I had the honor to take part on demonstrate the aMoSeRo to hundrets of children. Next to it we showed some two dancing NAOs and the LeapMotion – all to explain the need of mathematics and informatics for future applications.
Some impressions:


