
This weekend I had the chance to indoor slam by simply walking through my flat with an [amazon asin=B005UHB8EK&text=Asus Xtion] (150 EUR), an 9DRazor (+3.3 FTDI and Cable around 100 EUR) and a common [amazon asin=B004URCE4O&text=Laptop].
By setting up ROS Indigo and using existing software I now can create a simple 2D map of my flat and thanks to the PhD Programm Heterogeneous Cooperating Teams of Robots (Hector) of the TU-Darmstadt, which I slightly modified to fit the low cost setup, the results are quite impressive.
-
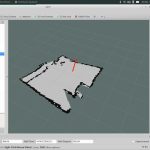
- Starting in a square room, nearly led to correct results
-
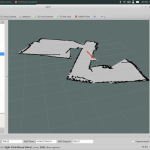
- leaving the room entering the hall/corridor
-
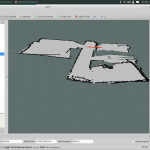
- quickly mapping two more rooms
The Xtion is not capable of delivering a 360 degree view, which is why i needed to walk slowly. By changing the setup from a weak ARM to an powerful Intel i5, data rates and size was way better than the aMoSeRo was capable of:
-

- my test setup
-

- FTDI 3.3V Controller
-
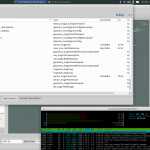
- performance of data aggregation is not longer and issue o/
For the ROS interested folks here some ROS related graphs:
-

- ROS TF Tree of the setup
-
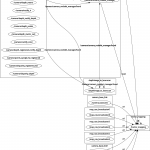
- ROS Node Graph of the setup
-

- ROS Topics Graph of the setup
It has been a weekend project, therefore the source and some semantic things are not beautiful but working. E.g. the TF Tree is statically imitating the suggested setup on the Hector Wiki.
Maybe we could profit from using two Xtions and merging the /scans together. By that we would achieve a 300 EUR replacement of a at least 1000 EUR 2D Laser Scanner and would be able to 3D PointCloud everything later.