
Today I am trying to setup all parts of the coming robot. Because assembling and disassembling would take hours until finding the right configuration and saving steps in between it would be impossible – I thought of a better way. Using my shopworn SketchUp skills and way more time than I expected – finally there is a non perfect but practicable model with the most important parts that are going to be installed. All of them already have the correct physical dimensions which also means that it would be possible to deploy the robot in rviz later, or at least parts of it.
Here are some early stage impressions:

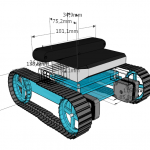
concept phase: iso view
-
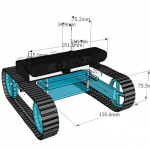
- concept phase: bottom view
-
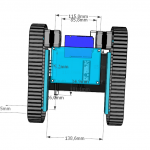
- concept phase: back view
-
- concept phase: front view
The wireframe boxes are space required by usb plugs or power jacks. These need to be accessible and can’t be blocked by anything else.
This robot is not ready yet, everything needs to be rearranged and boxed soon. Some parts are still missing, and no cables are shown, so everything will be more packed than it looks like.