It’s still not easy finding the right combination and arrangement of all robot parts. Like mentioned in the previous post, SketchUp is a nice tool for easy 3D visualization using real physical dimensions. So I spend some time again:
-

- virtual disassembling
-
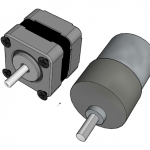
- NEMA17 probably getting replaced by RB-35s
-
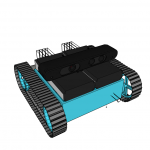
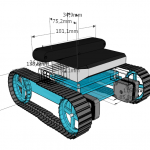
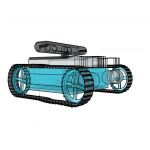
- concept phase II – ISO
-
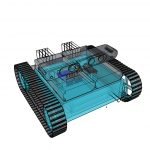
- concept phase II – ISO Xray
-

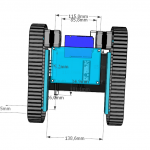
- concept phase II – front
-

- concept phase II – xray
-

- concept phase II – top
-
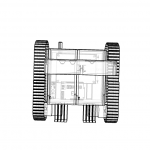
- concept phase II – top wireframe
-
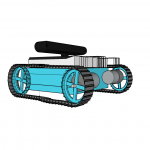
- concept phase II – back
-
- concept phase II – back Xray
-
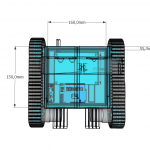
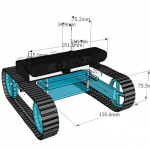
- concept phase II – bottom Xray with dimensions
-
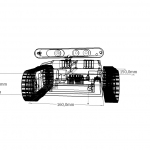
- concept phase II – front wireframe with dimensions
So tomorrow I am trying to by the planned box and the new motors, hopefully posting real world photos soon.