
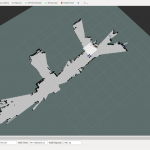
Today is the day of the first accurate aMoSeRo map. I tried several slamming algorithms e.g. the hector_mapping package, but data has been to bad. So after reviewing nearly all my code, fixing a lot of unit issues and publishing rates, today the first map has been created, which really is a map of the place I am living!
-
- Mapping: faulty sensor data lead to strange rooms
-
- Mapping: First experiments… …at least the walls are not round anymore…
-
- Mapping: the journey begins
-
- Mapping: all the well measured way
-
- Mapping: up to the next rooms
-

- Mapping: Point cloud data is possible, but only while standing (computation issues)