It sure is. But a good odometry in a robotic context is an objective that is hard to achieve. For a robot like the aMoSeRo only two main velocities are relevant: linear and angular speed. Both do not occur on the same time, but still – correctly determining any of them is essential as most higher algorithms like slamming and planning highly depend on it. For me in a out of time running thesis, this task can be the biggest still kinda opened challenge.
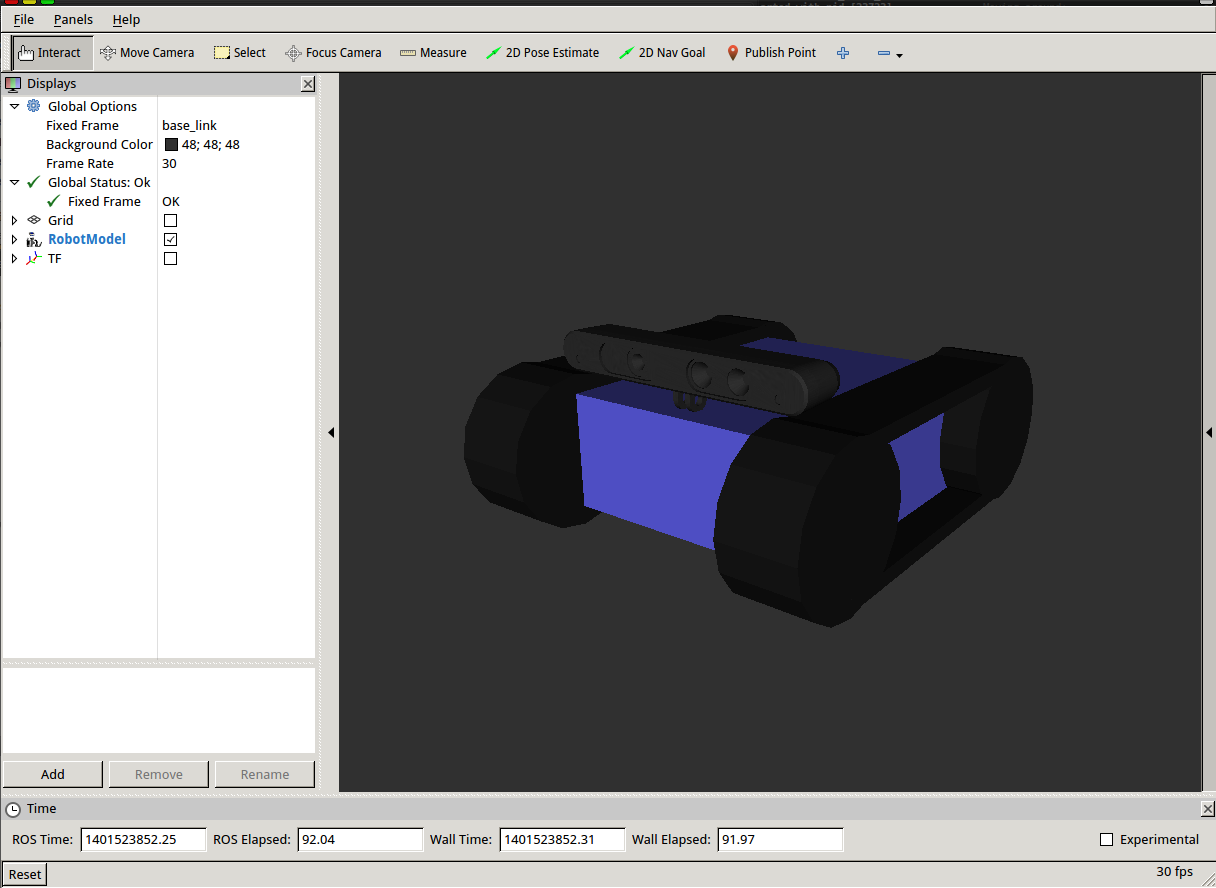
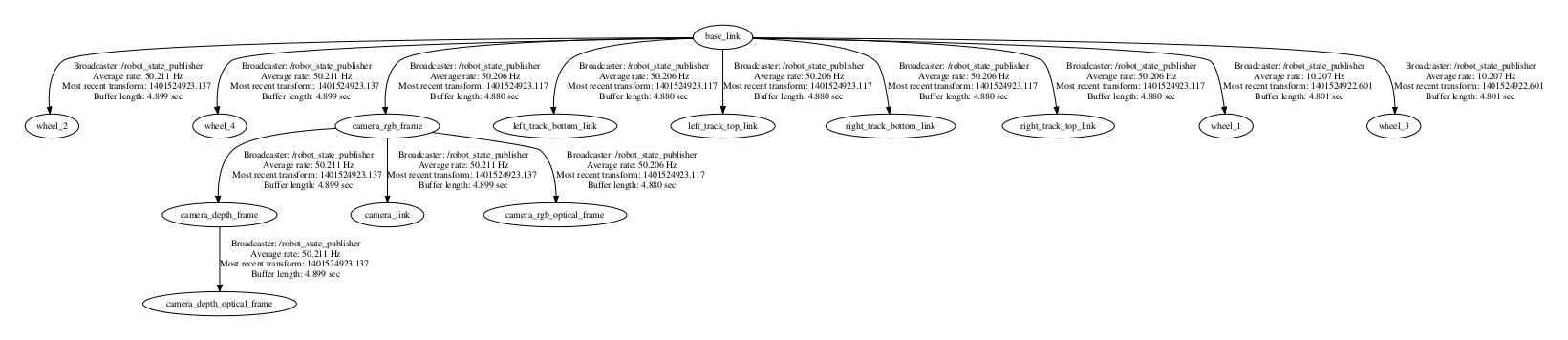
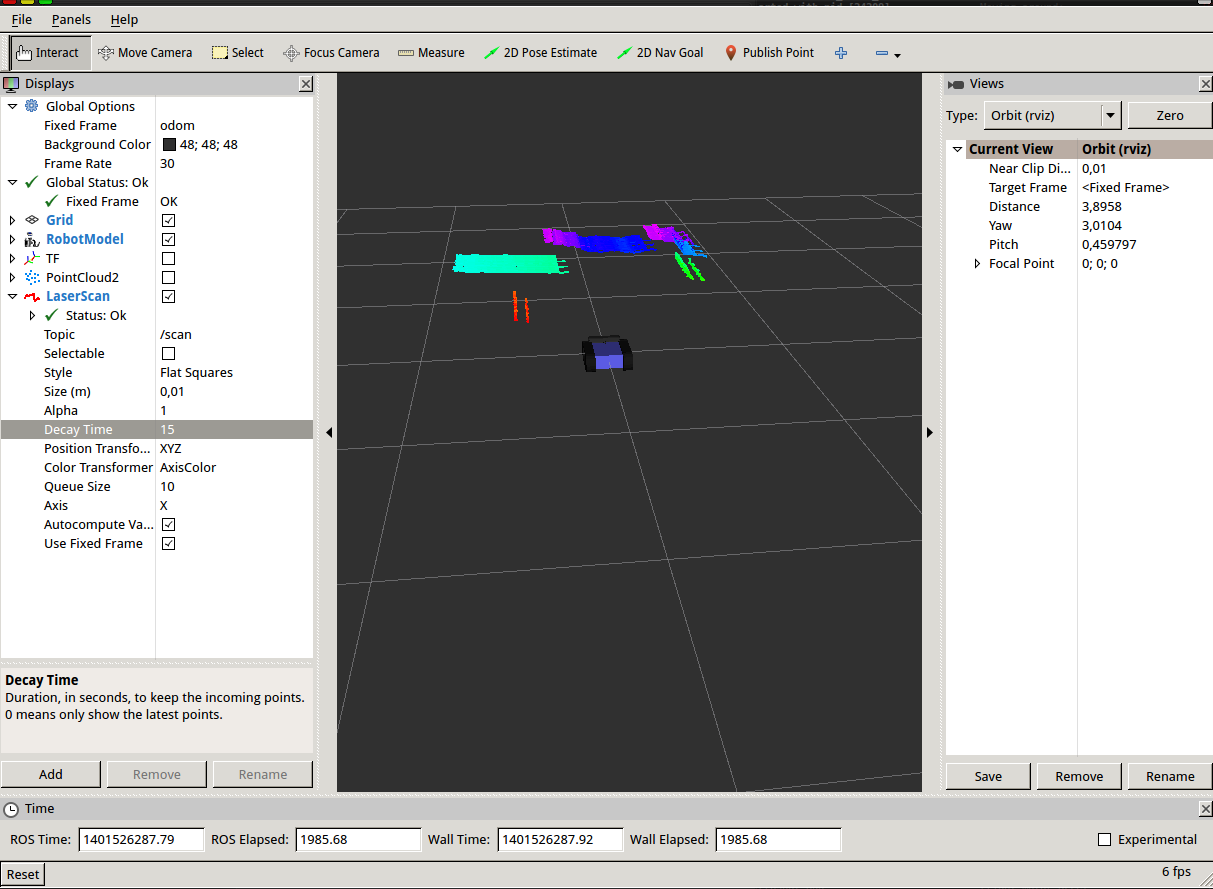
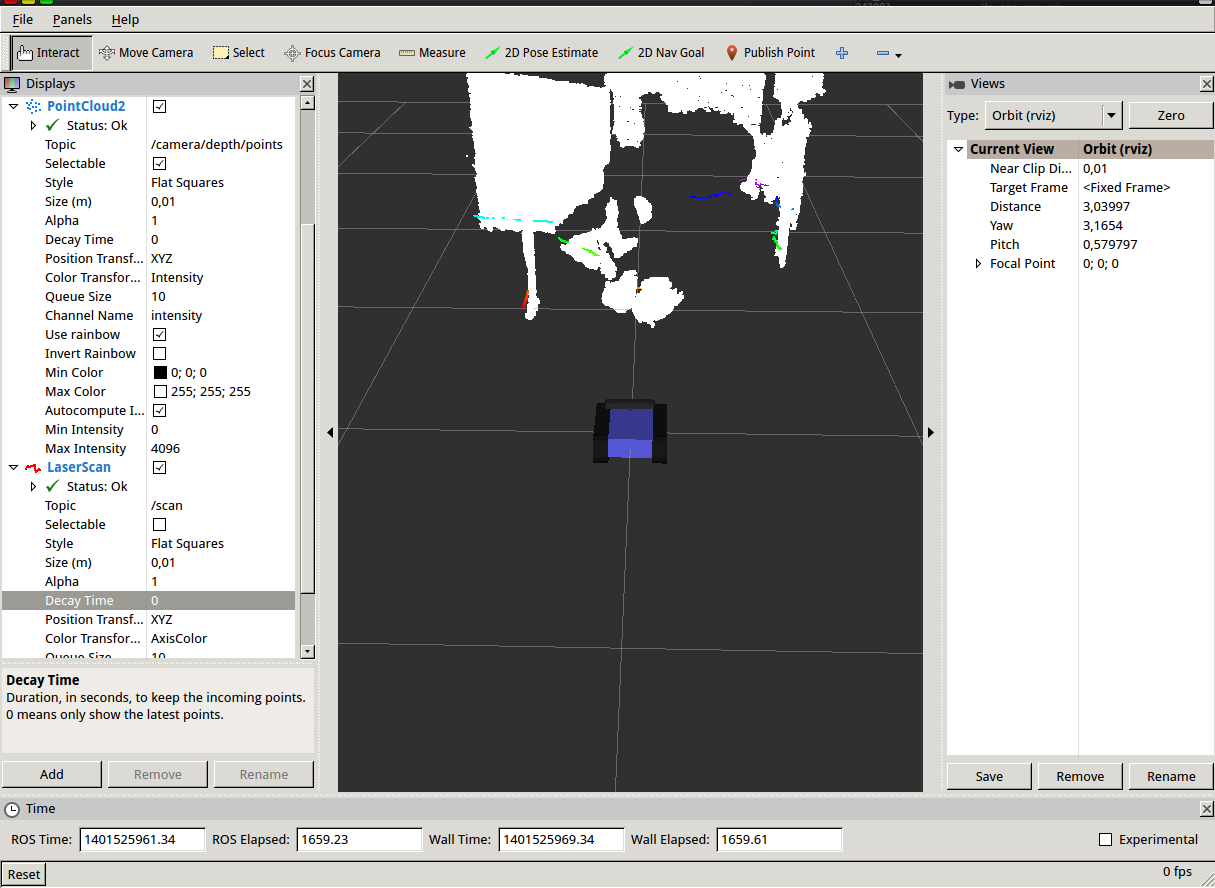
All other system parts like gmapping, robot_pose_ekf, tf_broadcasts, sensor code, drivers, dynamic_reconfigure (insert long list of other important things here) are up and well enough running. Most of the thesis is written, only evaluation (experiments) and conclusion (the big round up in the end) is still missing.
Therefore I am really looking forward to a time after my thesis – full of well deserved sleep and a university degree 🙂