
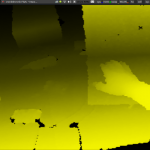
I’ve completed a new version today. It is a bit smaller and heavier, but already running ros hydro (I will write a small tutorial soon how to achieve that) with OpenNI2 and the ros-package openni2-camera. With that its possible to stream data to another computer visualizing the depth image of the [amazon &title=Asus Xtion&text=Asus Xtion] in rviz. I had some trouble solving and compiling all drivers, dependencies like ros-packages and libs like openCV (see Howto).
When the camera node is running the Raspberry is faced at with a processing load of 100%. The used network bandwidth is about 200-300 kb/s.
I suppose the raspberry Pi needs to be replaced by something stronger soon.
But for my first week in robotics, it’s something 🙂
-

- Rasberry Pi ROS Robot #1
-

- Rasberry Pi ROS Robot #1
-

- Rasberry Pi ROS Robot #1
-

- Rasberry Pi ROS Robot #1
-
- SimpleViewer OpenNi2 Screenshot
-
- Rasberry Pi ROS Robot #1 sensor_msg/Image with depth Stream
-
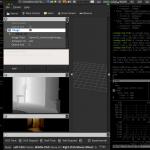
- Rasberry Pi ROS Robot #1 able to stream depth and RGB at once