After a long period of ups and downs and a relationship which best gets described as “complicated” with my Mendel Prusa i2 the results are really getting better and therefore also bigger. It also starts ti feel like fun to print stuff instead of beeing tensed up all the time.
So today I printed a fillament holder roll, which when assembled consists of two bearings and a plastic bearing holder (8*3*4cm). I also got in touch with blender to edit the STL files other than the non linux Sketchup, which lately tends to produce broken CAD models which cause slic3r to crash.
See the results below:
-

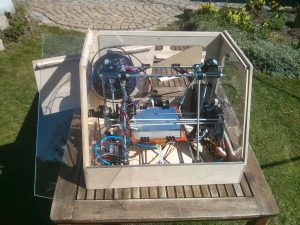
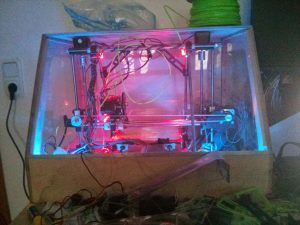
- 2015-09-07 Current 3D Printer location on top of a IKEA shelf
-
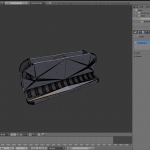
- 2015-09-07 Blender 3D Model of the fillament holder
-
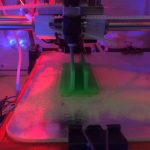
- 2015-09-07 Pronterface during Print
-
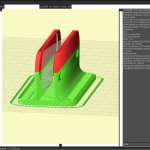
- 2015-09-07 Print View
-
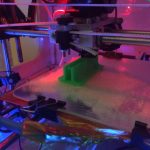
- 2015-09-07 Print View
-
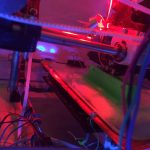
- 2015-09-07 Print View
-

- 2015-09-07 Prusa Axus Stop
-

- 2015-09-07 Prusa Axus Stop
-

- 2015-09-07 8 fixing angles
-

- 2015-09-07 fillament roll holder
-

- 2015-09-07 fillament roll holder
-

- 2015-09-07 fillament roll holder