The CubieTruck (or so called Cubieboard 3) is the third board of CubieTeam. It is a new PCB-Version with a Allwinner A20 Chip, which has also been used in the CubieBoard 2. But now there is more RAM (2GB) and onBoard VGA-graphics Controller, onBoard Wifi (!) and BLuetooth. There are some more features mentioned below, but for my project the main advantages are: more processing power (2 stronger cores), lower power consumption (500mAh at 5V), lots of GPIOs (2mm!) and flash memory.
So I unboxed one today:
-

-
CubieTruck – Box
-

-
CubieTruck – a lot of additional equipment, including a case
-

-
CubieTruck – nicely packed
-

-
CubieTruck – an additional level for 2,5 inch HDD
-

-
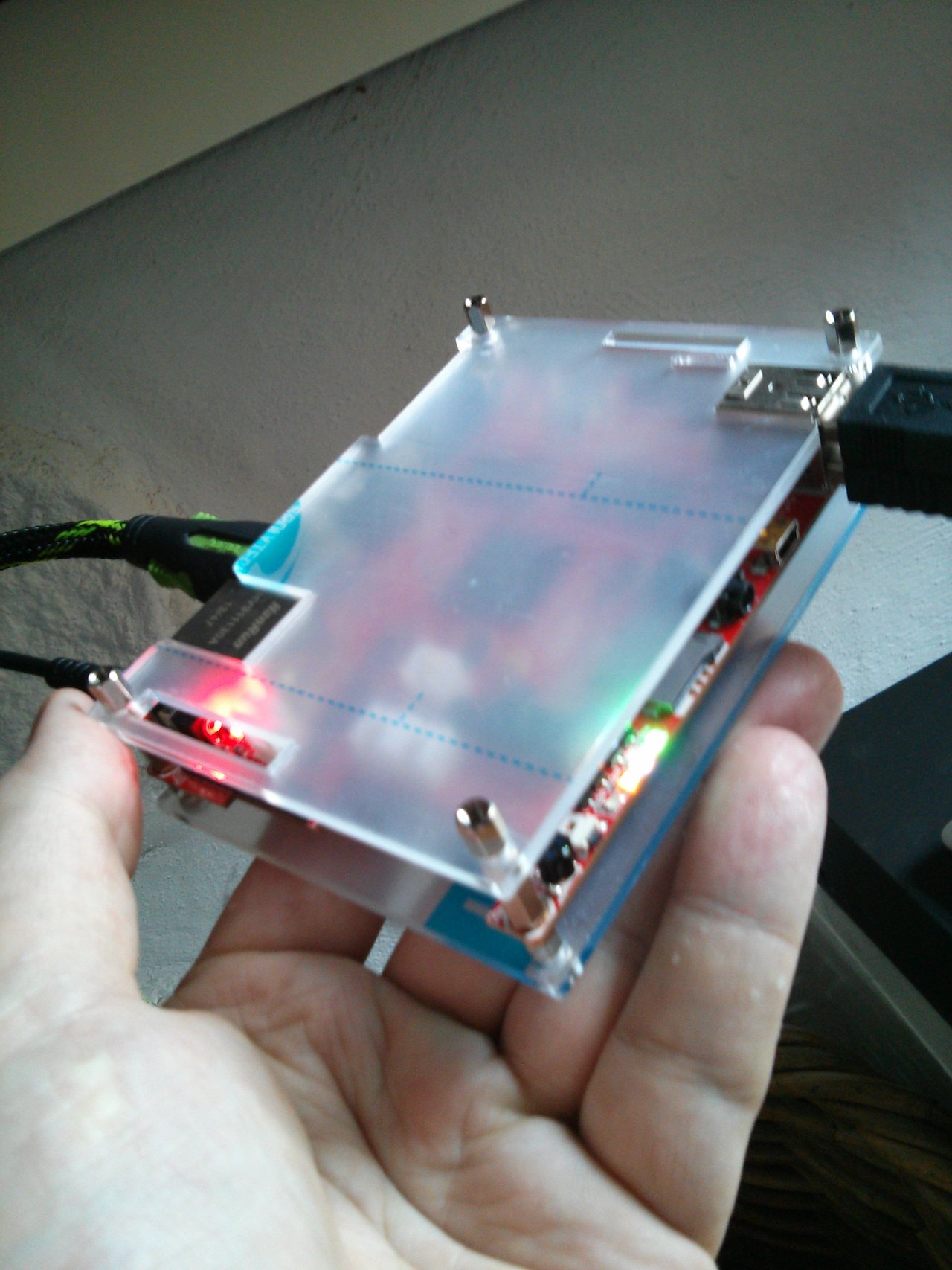
CubieTruck – side
-
-
CubieTruck – side
-

-
CubieTruck – two sizes 5 and 5.5 where needed.
-

-
CubieTruck – connected to HDMI
It came with an android os flashed. So after some reading and kinda confusing tutorials I managed to get the correct version 13.04 of lubuntu server running on a sd card, installed ROS on it and was faced with some kind of paradies of ros hydro armhf packages!
Something I was really missing at the [amazon &title=Raspberry Pi&text=Raspberry Pi].
So after the first day of CubieBoard I am really looking forward to get this little fellow beeing the heart of my ROS Robot.
Features:
- Allwinner Tech A20 SOC
- SATA supported
- 54 extended pins
- Built-in HDMI/ VGA display interface
- Built-in WIFI+BT module
- 2GB DDR3 RAM
- Built-in IR receiver
- SPDIF audio interface
Specifications:
- Allwinner Tech SOC A20 ARM® Cortex™-A7 Dual-Core ARM® Mali400 MP2 Complies with OpenGL ES 2.0/1.1
- 2GB DDR3@480MHz
- HDMI&VGA 1080P display output on-board
- 10M/100M/1G Ethernet
- WIFI + BT wireless connection with antenna on-board
- SATA 2.0 interface support 2.5’ HDD (for 3.5’ HDD, only need another 12V power input)
- Storage solution NAND + MicroSD
- 2 x USB HOST, 1 x OTG, 1 x SPDIF, 1 x IR, 4 x LEDs, 1 x Headphone, 3 x Keys
- Power DC5V@2.5A with HDD support Li-battery & RTC
- 54 extended pins including I2S, I2C, SPI, CVBS, LRADC x2,UART, PS2, PWM x2, TS/CSI, IRDA, LINEIN&FMIN&MICIN, TVIN x4 with 2.0 pitch connectors
- PCB size 11cm *8cm*1.4mm



 Topics Overview – amosero a distributed system still far from optimal
Topics Overview – amosero a distributed system still far from optimal