It is the second time I need to adjust my URDF Model for the sake of NOT following the REP (ROS Enhancement Proposal). This time it is about the relationship between base_link and a not REP mentioned base_footprint.
As REP105 says the ‘Relationship between Frames’ should be:
map –> odom –> base_link
but the relation chip for the Willow Garage (or now Clearpath Robotics) robot PR2 is
map --> odom_combined --> base_footprint --> base_link
which is the exact demand of the robot_pose_ekf package.
So Willow Garage, Y U NO Stick to your own REP105 ?

(See more on Know Your Meme)
I suppose because of backwards compatibility, some code might get broken, but what about using some parameters, maybe with a (even hard coded) default fallback?
So for the aMoSeRo there is a decision to be made. Using base_link or base_footprint? Or both? Which frame is the one near to earth?
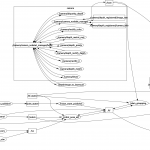
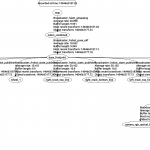
If decided to take both as a matter of compatibility to other packages and reordered my TF tree:

Still questionable if the base_footprint should have wheels and tracks attached, but that is more a question of taste because they have no special task.

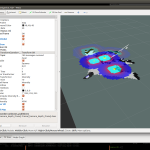
Now the robot has a light grey base_footprint, and a blue base_link.